| Disclaimer: Some papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author’s copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder. |
Autonomous Ground Vehicles
Response of Autonomous Vehicles to Emergency Vehicles

The objective of this project is to explore how an autonomous vehicle must safely respond to different classes of emergency vehicles using sound, vision and other onboard sensors. Emergency vehicles can belong to police, fire, hospital and other responders. The autonomous vehicle in the presence of an emergency vehicle must have the ability to accurately sense its surroundings in real-time and be able to safely yield to the emergency vehicles. System safety is the main theme where we work with TEEX Law Enforcement and Security Training, and through them with local police/fire department. Currently, an integrated system approach which considers both sensing and control in addition to the test procedures and safety analysis is not available for an autonomous vehicle in emergency scenarios. This project will address this gap and experimentally verify the performance of the proposed algorithms on our autonomous vehicle (Ford-Lincoln MKZ) available through the Connected Autonomous Safe Transportation (CAST) program. The research performed through this project will also be published in peer-reviewed conferences and journals, and will support the thesis of two graduate students. [Read more…]
This project is sponsored by Safe-D https://www.vtti.vt.edu/utc/safe-d/
Commercial Truck Platooning (CTP)
 Deployment of passenger autonomous vehicles in broad unconstrained environments poses significant demands on the sensors and technologies needed, while still leaving big gaps in user acceptance and general trustworthiness – all this leading to a relatively steep barrier to near-term deployment.
Deployment of passenger autonomous vehicles in broad unconstrained environments poses significant demands on the sensors and technologies needed, while still leaving big gaps in user acceptance and general trustworthiness – all this leading to a relatively steep barrier to near-term deployment.
On the other hand, deployment of autonomous platooning capabilities in the commercial truck segment offers a significant value proposition for multiple stakeholders (truck driver – fatigue and comfort, fleet operators – logistical and operational efficiencies, traffic flow, traffic safety, etc.) that we believe they are great candidates for near-term deployment.
[Read more…]
Unmanned Aerial Vehicles
Combinatorial Motion Planning for Dubin’s Vehicles
The basic problem is to find a minimum distance path for an UAV that visits a given set of survilleance points in the presence of yaw rate constraints of the UAV. This problem has two coupled sub problems: 1) the combinatorial subproblem that requires finding a sequence of points for a UAV to visit, 2) the motion planning subproblem that requires finding a path that satisfies the yaw rate constraints of the UAV. One can also think of the generalization of the single vehicle problem extended to multiple vehicles.[Read more…]
UAV Planning Algorithms for Persistant Survilleance

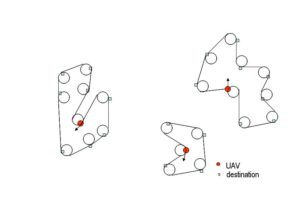
The problem we consider is of planning a closed walk to enable a UAVs to persistently monitor of a finite number of targets in a dynamically changing environment. The UAVs must physically visit the targets in order to monitor them and collect their information. These are the key ideas we are considering:
- The frequency of monitoring any given target is intuitively specified by a target revisit time.
- The relative importance of a target is specified by a weight associated with the target and is an indication of how small its revisit time.
Multiple Vehicle Path Covering Algorithms with Localization Constraints
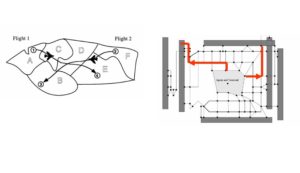
Most of the multiple vehicle path planning algorithms that arise in surveillance applications in the literature currently rely on the use of the Global Positioning System (GPS) information. However, intentional and unintentional interference in both military and civil scenarios can easily disrupt the GPS signals, and as a result, render the path planning algorithms not applicable. This project provides a new way of addressing this difficulty by combining techniques from cooperative localization and path planning. Specifically, looking in two fundamental problems related to path planning of vehicles in GPS denied environments and provides novel algorithms to solve the same.
Task Allocation Algorithms for Heterogeneous UAVs
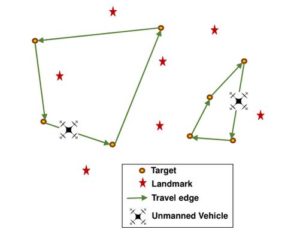
 In this work, we aim to develop task allocation algorithms for routing a collection of heterogeneous UAVs that may travel at different speeds, and carry different sensors. Recently, we have developed a 2-approximation algorithm for a multiple heterogeneous vehicle routing problem based on the primal-dual method. The primal-dual method we adopt is based on the work by Goemans and Williamson for the constrained forest problems.[Read more…]
In this work, we aim to develop task allocation algorithms for routing a collection of heterogeneous UAVs that may travel at different speeds, and carry different sensors. Recently, we have developed a 2-approximation algorithm for a multiple heterogeneous vehicle routing problem based on the primal-dual method. The primal-dual method we adopt is based on the work by Goemans and Williamson for the constrained forest problems.[Read more…]
Other Research Areas
Synthesis of Optimal Networks
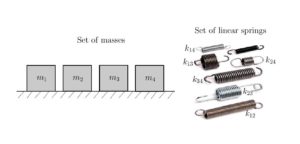 The fundamental question we aim to address is as follows: Given all the components of a system, how do we put these components together in order to obtain a desired response? In the context of a mechanical system, the objective is to connect the masses with springs in a suitable way such that a desired response can be obtained for a given set of input forces acting on the masses. In the simplest of the scenarios, this problem further reduces to the objective of finding a suitable interconnection of the masses using the given springs such that the smallest non-zero natural frequency of the interconnection is maximized. [Read more…]
The fundamental question we aim to address is as follows: Given all the components of a system, how do we put these components together in order to obtain a desired response? In the context of a mechanical system, the objective is to connect the masses with springs in a suitable way such that a desired response can be obtained for a given set of input forces acting on the masses. In the simplest of the scenarios, this problem further reduces to the objective of finding a suitable interconnection of the masses using the given springs such that the smallest non-zero natural frequency of the interconnection is maximized. [Read more…]
Approximation Algorithms for Multiple Traveling Salesman Problems (TSPs)
 We have developed the following approximation algorithms for several variants of the Multiple TSP and Multiple Hamiltonian Path Problem (HPP):[Read more…]
We have developed the following approximation algorithms for several variants of the Multiple TSP and Multiple Hamiltonian Path Problem (HPP):[Read more…]
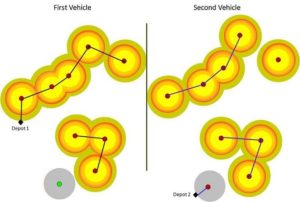
Path Planning Algorithms for UAVs with fuel constraints
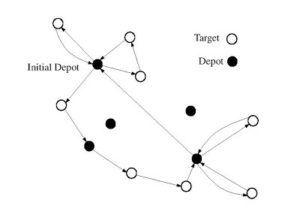
problem where there are multiple depots and the vehicle is allowed to refuel
at any depot. The objective of the problem is to find a path for the UAV such
that each target is visited at least once by the vehicle, the fuel constraint is
never violated along the path for the UAV, and the total fuel required by
the UAV is a minimum. We develop an approximation algorithm for the
problem, and propose fast construction and improvement heuristics to solve
the same.