
Background
Deployment of passenger autonomous vehicles in broad unconstrained environments poses significant demands on the sensors and technologies needed, while still leaving big gaps in user acceptance and general trustworthiness – all this leading to a relatively steep barrier to near-term deployment.
On the other hand, deployment of autonomous platooning capabilities in the commercial truck segment offers a significant value proposition for multiple stakeholders (truck driver – fatigue and comfort, fleet operators – logistical and operational efficiencies, traffic flow, traffic safety, etc.) that we believe they are great candidates for near-term deployment.
TxDOT Project:
CAST is now part of TxDOT sponsored project titled “Commercial Truck Platooning Demonstration in Texas – Level 2 Automation”, under contract No. 0-6836, led by Texas A&M Technical Institute (TTI), and involving several industry partners.
Through this project, the Texas Department of Transportation (TxDOT) funded the creation of a comprehensive truck platooning demonstration in Texas, serving as a proactive effort in assessing innovative operational strategies to position TxDOT as a leader in this research area and the overall transportation systems management and operation using connected vehicle and automated vehicle (CV/AV) initiatives. The focus was on the feasibility of deploying truck platoons with two or more vehicles on specific corridors in Texas within 5 to10 years. The project brought together major partners, including government agencies, national labs, truck manufacturers and equipment suppliers, all of which have committed resources in terms of in-kind matching of equipment, engineering services, and intellectual property.
Phase 1 of this project has been completed with a concept demonstration of platooning of two trucks. Phase 3 is intended to be demonstration and evaluation of limited deployment by commercial fleet operators. The current phase , Phase 2, is getting ready for deployment readiness (in preparation for Phase 3).
CTP (TDP):
The Commercial Truck Platooning (CTP) Technology Demonstrator Platform consists of two tractor-trailers (Navistar tractor, Great Dane trailer). The Leading Vehicle (LV) is driven manually by a driver. The Following Vehicle (FV) can also be driven manually, but has the capability to drive autonomously in platoon formation. Such platoon formation is enabled through appropriate hand-shake between the LV driver and the FV driver through a custom HMI developed by Ricardo Engineering, who also performed the system integration during Phase 1.
The LV and the FV communicate with each other through a Dedicated Short Range Communication (DSRC) device provided by DENSO Corporation. Both the vehicles are equipped with a GPS/IMU from Novotel, a Mobil Eye vision system, a Radar from DENSO, a Wingman Fusion that combines vision and Radar from Bendix, a brake-by-wire system from Bendix, electric steering from ZF-TRW, Driver alertness management system from Lytx.
CAST Phase 2 Focus:
We will adopt Model Based Systems Engineering (MBSE) processes to drive our activities as we prepare the systems for deployment readiness.
 Some of the major focus areas are:
Some of the major focus areas are:
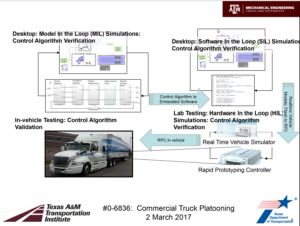
- Verification (and Validation) of the system performance against the requirements. V&V will be performed using virtual models (leveraging our VAVS-TDP) as also using test facilities available at our RELLIS campus.
- Advanced dynamic controls
- Advanced sensing and perception algorithms
- Safety-driven Software Architecture
TDP Progress
- Multiple two-truck platooning demonstrations have already been completed
- Preparations for deployment readiness underway
- A Requirements-driven V&V environment has been established, and both simulation-based and experiments-based testing for V&V is in progress
- Safety analysis and safety-driven software architecture development is in progress