A Path planning project for UAV’s.
Journal Publications:
D. Levy, K. Sundar, S. Rathinam, Heuristics for Routing Heterogeneous Unmanned Vehicles with Fuel Constraints, Mathematical Problems in Engineering, April 2014. (pdf)
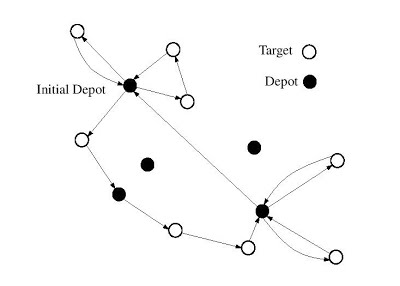
K. Sundar and S. Rathinam, Algorithms for Routing an Unmanned Aerial Vehicle in the Presence of Refueling Depots, IEEE Transactions on Automation Science and Engineering, Jan. 2014, pp.287-294. (pdf)
Conference Publications:
K. Sundar and S. Rathinam, Route Planning Algorithms for Unmanned Aerial Vehicles with Refueling Constraints, American Control Conference, Montreal, Canada, 2012.