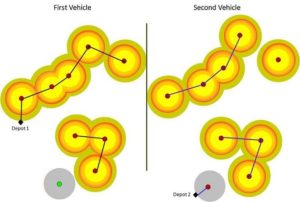
In this work, we aim to develop task allocation algorithms for routing a collection of heterogeneous UAVs that may travel at different speeds, and carry different sensors. Recently, we have developed a 2-approximation algorithm for a multiple heterogeneous vehicle routing problem based on the primal-dual method. The primal-dual method we adopt is based on the work by Goemans and Williamson for the constrained forest problems. [Read more…] about Task Allocation Algorithms for Heterogeneous UAVs
Autonomous Systems Laboratory